
In diesem Abschnitt bauen wir die Hardware von Serworm Michael auf. Wir gucken uns an, was wir alles benötigen und wie wir daraus den Roboterarm zusammensetzen. Starten wir mit einer Liste von Dingen, die hilfreich sein könnten:
- 1 Arduino MKR WiFi 1010
- 1 Dynamixel Shield für Arduino MKR
- 5 Dynamixel XL330-M288-T
- 1 5V Netzteil
- 1 Raspberry Pi (optional)
- 3D-Druck Teile
Servomotoren
Natürlich brauchen wir Motoren, um die Gelenke des Arms bewegen zu können. Hier habe ich mich für Dynamixel XL330-M288-T Servomotoren entschieden. Wieso? Robotis (Hersteller der Servos) hat sie mir zur Verfügung gestellt. Im Nachhinein bin ich sehr froh, dass ich diese Servos verwendet habe, denn sie haben einige Vorteile gegenüber den üblichen Servos, die ich sonst verwendet habe.

Controller für die Hardware von Serworm Michael
Passend für die Servos gibt es auch ein Shield, das die Servos mit Daten und Leistung versorgt. Dieses Shield ist für den Arduino MKR Formfaktor vorgesehen, daher kommt darunter ein Arduino MKR WiFi 1010.

Arduino MKR WiFi 1010 top 
Arduino MKR WiFi 1010 bottom 
Dynamixel Shield for Arduino MKR top 
Dynamixel Shield for Arduino MKR bottom 
Arduino MKR mit Dynamixel Shield
Zusätzlich verwenden wir in diesem Projekt noch ein weiteres Gerät verwendet, auf dem die Logik abläuft. Dafür kann eigentlich jedes Gerät genutzt werden, auf dem Python läuft. Ich hab mich für einen Raspberry Pi entschieden, da der neben dem Arm stehen bleiben kann. Jeder andere PC mit USB-Schnittstelle sollte es aber auch tun.

Der Zusammenbau ist denkbar einfach. Wir stecken das Dynamixel Shield for Arduino MKR auf den Arduino MKR WiFi 1010. An dieses Shield schrauben wir an die Schraubklemmen ein 5V Netzteil an. Laut Datenblatt kann ein Servo bis zu 1,47 A ziehen, bei 5 Servos sind das fast 7,5 A. Es ist aber sehr unwahrscheinlich, dass alle gleichzeitig unter Vollast laufen, daher tut es auch ein kleiner dimensioniertes Netzteil. Ich habe ein altes umgebautes ATX-Netzteil verwendet, damit läuft alles rund.
Den Raspberry Pi schließen wir einfach über USB an. Also USB-A Ausgang am Pi auf micro-USB am Arduino.
Struktur
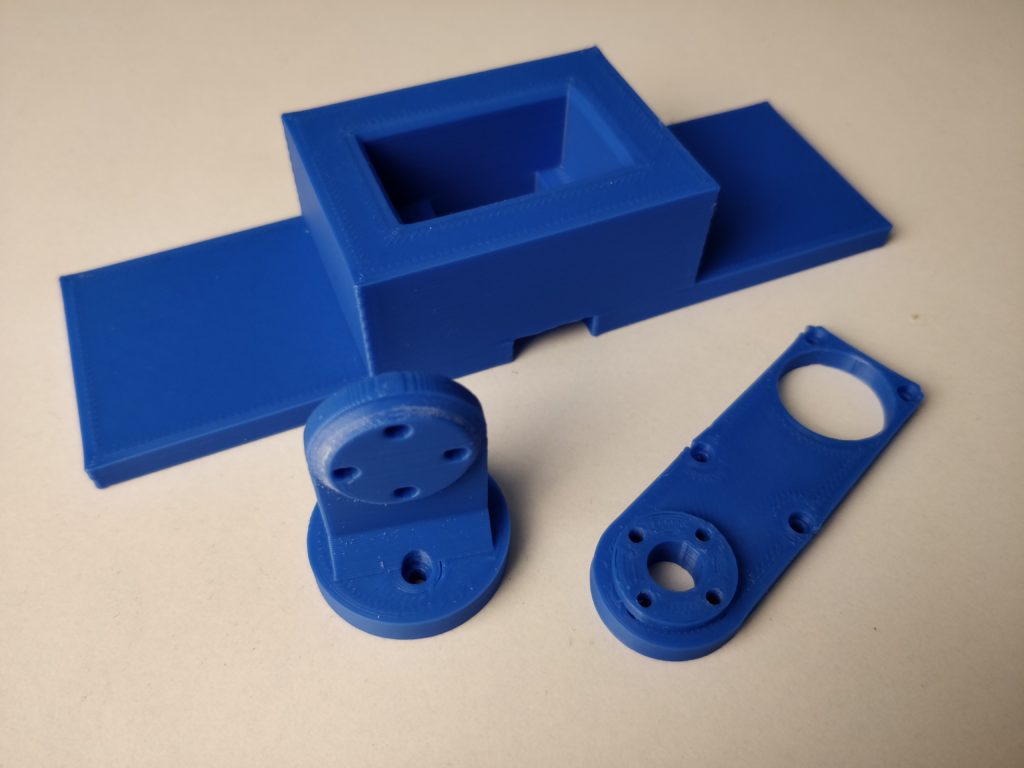
Das Setup soll möglichst einfach bleiben und wenig Teile benötigen. Daher werden als passive Bauteile ausschließlich ein paar wenige 3D-Druck Teile benötigt. Keine extra Lager, Riemen oder ähnliches! Das führt zwar dazu, dass der Arm nicht der stabilste ist, aber das muss er auch nicht sein.
Für die Hardware von Serworm Michael benötigen sogar nur 3 verschiedene 3D-Druck Teile. Eine Basis, die wir auf einen Tisch spannen werden, ein Verbinder zwischen Basis-Servo und Arm, und 4 Arm-Elemente. Das war es schon. Der Arm kann sich am Ende um die Basis drehen (um z) und jedes Element kann sich um y drehen.
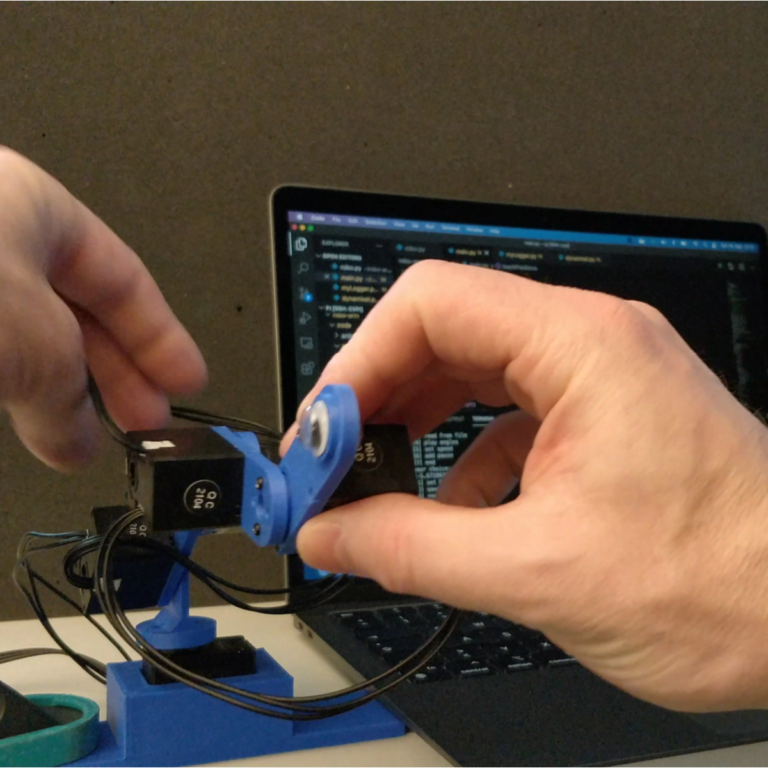
Zum Zusammenbauen verwenden wir einfach die Schrauben, die mit den Servos mitgeliefert werden. Die Schrauben durch die Löcher in den 3D-Druck-Teilen stecken und dann direkt an die Servos schrauben. Zuerst schrauben wir die Arm-Elemente an die Servos. Den Servo für die Basis bestücken wir zuerst mit zwei Kabeln und stecken ihn dann einfach ein. Auf den Basisservo schrauben wir das Verbindungselement. Anschließen schrauben wir alle Arm-Elemente nacheinander an.
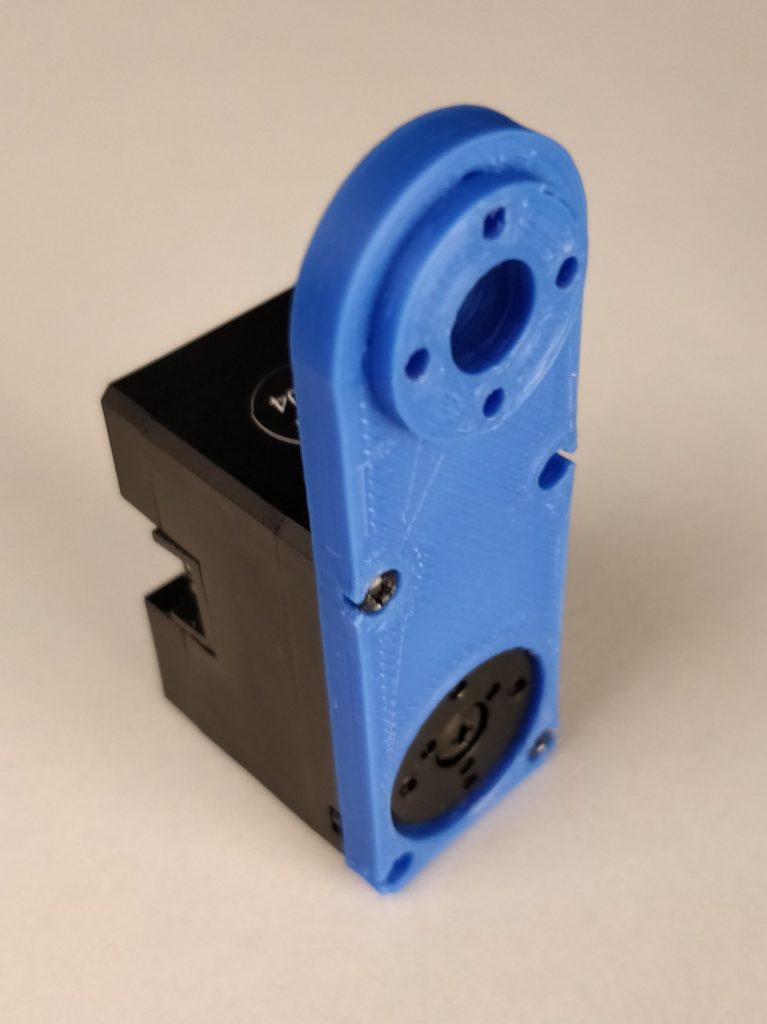
Arm-Element mit Servo 
Basis mit eingestecktem Servo 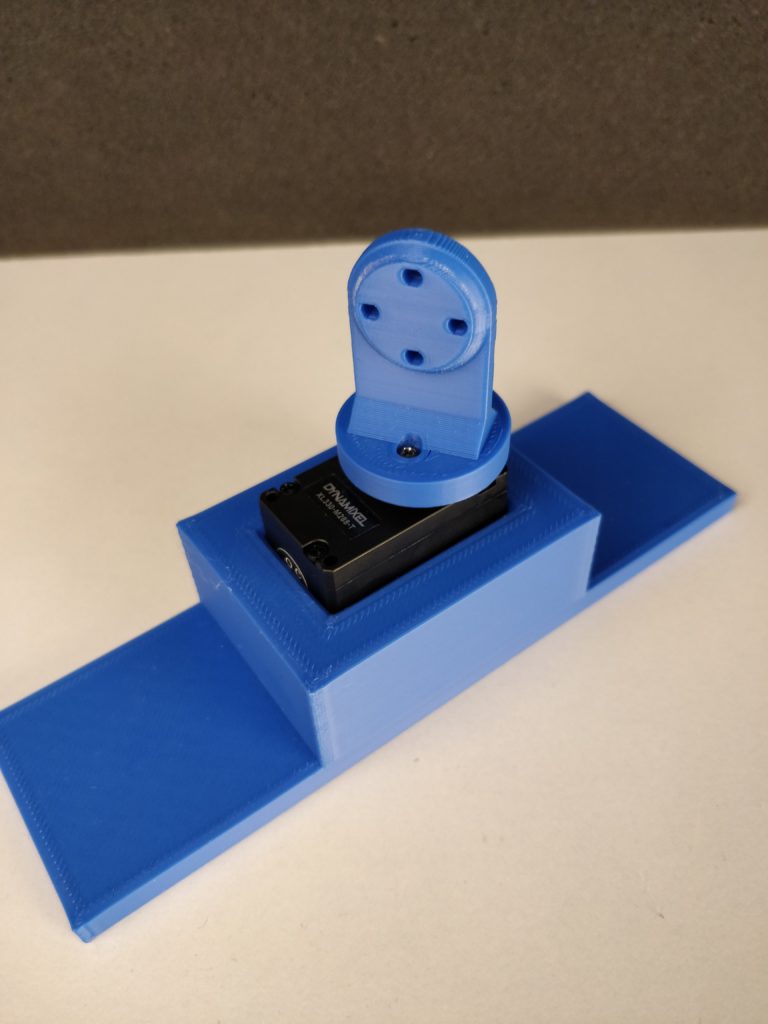
Angeschraubtes Verbindungsstück auf Basis 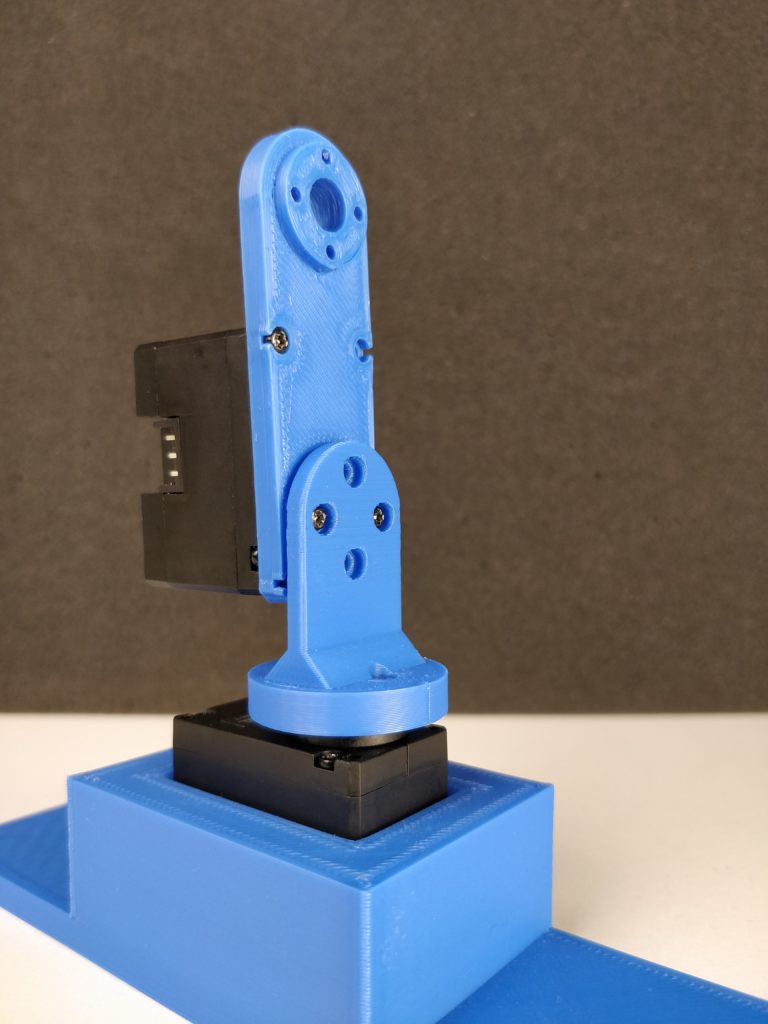
Basis mit einem Arm-Element
Nach vier Arm-Elementen sind wir fertig. Jetzt können wir alle Kabel anstecken. Die sind Verpolungssicher, sollte also keine Probleme geben. Die Servos werden seriell angesprochen und können alle auf dem gleichen Bus liegen. Das heißt wir nutzen den zweiten Stecker der Servos jeweils als Ausgang zum nächsten Servo, wie praktisch! Der Arm sieht am Ende zum Beispiel so aus (wenn ihr noch ein paar Augen zum aufkleben übrig habt):

Pingback: Robo Arm Serworm Michael • devdrik.
Was für ein großartiges Projekt!
Ich habe Sie aus Interesse einmal bei LinkedIn hinzugefügt und freue mich über neue Beiträge.
Falls Sie die Langlebigkeit der 3D Druck Teile durch tribologisch optimierte Kunststoffe erhöhen wollen, kontaktieren Sie mich gerne 🙂
https://www.igus.de/info/3d-druck-service
Vielen Dank 🙂
Mit tribologisch optimierten Bauteilen könnte ich noch den Luftspalt zwischen den Arm-Elementen weg lassen und etwas Steifigkeit und Präzision gewinnen (wenn in die richtige Richtung optimiert wurde) 😀
Aber Serworm Michael scheint es ohne auch schon gut zu gehen
Das stimmt, er macht eine super Figur. 🙂
Beste Grüße