Hier zeige ich euch meinen Creality CR-10s Umbau. Der CR-10s ist von Haus aus ein sehr guter Drucker in seiner Preisklasse, sodass grundsätzlich erst einmal keine Anpassungen notwendig sind, um gut gute Druckergebnisse zu erzielen. Wer aber technisch interessiert ist, der will natürlich mehr heraus holen und neue Dinge ausprobieren. Das ist auch der Hauptgrund, warum ich angefangen habe meinen Drucker umzubauen.
Erwartungen an den CR-10s Umbau
Natürlich erwarte ich mir von dem CR-10s Umbau auch Vorteile. In meinem Fall haben mich folgende Dinge gestört:
- Lautstärke
- Control Box nimmt Platz weg
Das sind zwei Punkte, die sich sehr gut in einem Rutsch bearbeiten lassen.
Lärmquellen vor dem CR-10s Umbau
Um die Lautstärke zu reduzieren lassen sich im Internet viele Wege finden. Man sollte dabei allerdings etwas aufpassen, denn es wird auch viel Beschrieben, was eher zu Problemen, als zu Verbesserungen führt. Aber schauen wir erst einmal wo der Lärm eigentlich her kommt. Im wesentlichen sind es zwei Arten von Lärm die aus drei Quellen kommen, welche wir durch den CR-10s Umbau ausmerzen wollen.
Lüfterlärm
Die eine Sorte ist Lüfterlärm. Dieser Lärm kommt wiederum aus zwei verschiedenen Quellen:
- Control Box (inkl. Netzteil)
- Druckkopf.
Und hier kann man auch schon in die erste Falle tappen. Wer hier denkt: Kein Problem, ich kaufe ich mir leise Lüfter und tausche die alten aus, der steht längerfristig vor weiteren Problemen. Denn die leisen Lüfter haben in der Regel auch einen geringeren Luftdurchsatz, sodass die Kühlung schlechter ist. Bei der Kühlung der Elektronik kann das durch größere Lüfter ausgeglichen werden, besonders wenn man die Control Box ohnehin abschafft.
Bei dem Cold-End Lüfter sieht die Sache etwas anders aus. Verwendet man weiter den originalen Käfig, dann passt nichts anderes, als ein 40mmx40mmx10mm Lüfter. Viele empfehlen hier der Noctua NF-A4x10, welcher in der Tat sehr schön leiste ist. Der Luftstrom aus diesem Lüfter reicht allerdings nicht aus, um das Cold-End hinreichend zu kühlen, sodass das Filament zu früh schmilzt, die Flussrate ändert und langfristig den ganzen Kanal verstopft. Daher empfehle ich am Cold-End etwas Lärm in kauf zu nehmen, oder den originalen Käfig auszutauschen, sodass ein größerer bzw. dickerer Lüfter verbaut werden kann.
Lärm aus Schwingungen
Die zweite Sorte Lärm kommt aus Schwingungen, die in den Rahmen eingeleitet werden. Sie werden von den Schrittmotoren generiert und bringen dann den ganzen Drucker zum Schwingen. Dabei hört man auch sehr gut, dass hin und wieder eine Resonanz getroffen wird, da der Drucker bei bestimmten Geschwindigkeiten besonders laut ist. Aber auch gegen diesen Lärm lässt sich durch den CR-10s Umbau etwas tun.
Schrittmotordämpfer
Ein Lösungsansatz sind die Schrittmotordämpfer. Wer diese beim CR-10s Umbau einbaut wird sicherlich merken, dass der Drucker tatsächlich etwas leiser geworden ist. Dem Mechaniker in mir fallen dabei aber einige Probleme auf:
- Um die Übertragung der Schwingungen vom Motor auf den Rahmen zu reduzieren wird hier die Steifigkeit der Verbindung reduziert und ein höher dämpfendes Material verwendet. Vom Grundgedanken eine funktionierende Herangehensweise, aber natürlich gibt es nichts umsonst… Die Motoren spannen nämlich die Riemen und durch die weichere Verbindung haben diese zum mehr Spiel, was wiederum zu einer Verschlechterung der Druckbildes führen kann. Ich habe die Dämpfer aber selbst getestet und kann sagen, dass man dadurch durchaus eine Verbesserung des Geräuschpegels erreicht. Das Druckbild wurde nicht unbedingt schlechter, ich hatte aber seit dem Einbau immer wieder verschiedene mit dem Drucker.
- Das größere Problem an dieser Lösung ist, dass es gar keine Lösung des Problems ist. Es werden nämlich klassisch nur die Symptome anstelle der Ursachen bekämpft. Denn die beste Lösung um keine Schwingungen in den Rahmen einzuleiten ist, indem man die Schwingungen gar nicht erst auftreten lässt. Damit hat man durch den CR-10s Umbau die Ursache bekämpft und somit eine saubere Lösung, welche viele Vorteile mit sich bringt.
Ursachensuche
Wie können wir nun also die Ursache bekämpfen? Dazu müssen wir erst einmal Verstehen, wo die Schwingungen herkommen. Die Ursache liegt in der Bauform der Motoren. Es sind Schrittmotoren. Das „Schritt“ darin bedeutet, dass der Motor nicht kontinuierlich dreht, sondern immer Schritt für Schritt weiter dreht, wie der Sekundenzeiger einer Uhr. Das bedeutet, dass das System immer wieder einer Sprunganregung ausgesetzt wird, was dazu führt, dass das System mit einer Schwingung antwortet. Je größer nun diese Sprunganregung ist, desto größer fällt auch die Antwort aus. Der Rahmen überträgt dann die Schwingungen und gibt sie über die Luft an euer Ohr weiter – der Lärm ist perfekt…
In dieser Ausführung hat der aufmerksame Leser eventuell schon die Lösung des Problems entdeckt. Denn je kleiner die Sprünge sind, desto kleiner fällt die Antwort aus und damit sinkt auch der Lärmpegel. Das Ziel ist demnach diese Sprünge zu verringern. Am Beispiel der Uhr würden wir also dafür sorgen, dass der Sekundenzeiger nicht 60 Mal pro Minute macht, sondern vielleicht 120 mal. Damit muss er nur noch halb so viel Weg wie vorher zurücklegen.
Wie lässt sich das aber für die Schrittmotoren des Druckers Umsetzen? Durch besser Motortreiber!
Lösung: Motortreiber beim CR-10s Umbau wechseln
Wir müssen also Motortreiber finden, die in der Lage sind die Motoren mit kleinen Schritten anzutreiben. Für den CR10s, bzw. die Nema 17 Motoren, die darin verbaut sind, werden wir schnell fündig. An der Spitze sind die Treiber von Watterott. Da gibt es die TMC2100, TMC2130, TMC2208 und TMC2209 als geeignete Treiber. Ich habe mich für die TMCMC2208 entschieden, da ich eine einfache UART-Verbindung bevorzugt habe, etwas mehr Strom zur Verfügung haben wollte und weil ich auf die Zusatzfunktionen, die mit dem TMC2130 möglich gewesen wäre, verzichten konnte. Die TMC2209 gab es noch nicht, sonst wären die es geworden.
Im nachhinein frage ich mich allerdings, ob es wirklich einfacher ist die TMC2208 über UART zu verbinden, oder ob es nicht auch Vorteile gehabt hätte die TMC2130 über SPI zu verbinden. Der CR-10s kommt mit einem Board auf dem die A4988 Treiber fest verlötet sind.
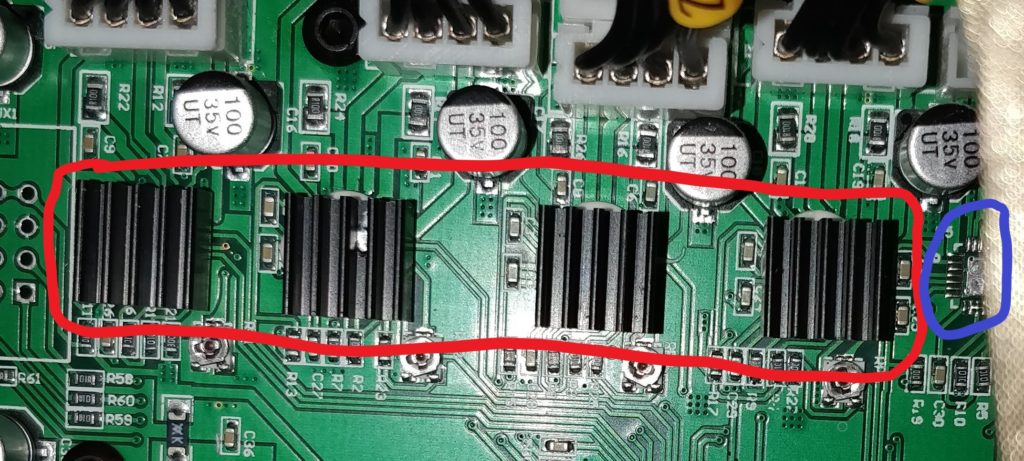
Die Treiber verstecken sich auf dem Bild unter den rot markierten Kühlkörpern. Blau umkreist sieht man noch ein freies Lötpad für einen fünften Treiber. Auf dem Board werden nur 4 verwendet, da beide Z-Achsen Motoren vom gleichen Treiber bewegt werden. Das Board ist durch die verlöteten Treiber eher ungeeignet, um die Treiber zu wechseln, daher sollte auch gleich ein neues Control Board her.
Auswahl eines geeigneten Control Boards für den CR-10s Umbau
Schaut man sich in Bezug auf Boards ein bisschen um, dann findet man schnell viele Optionen, die alle so ihre eigenen Vor- und Nachteile haben. Dabei gibt es erst einmal ein paar grundlegende Entscheidungen zu treffen.
- 8 Bit oder 32 Bit Prozessor?
- 12V oder 24V ?
- Erweiterbar und Änderbar oder fertig und voll integriert?
- Was soll noch alles angeschlossen werden (Z-Probe, Display, ..)
- Was darf das ganze kosten?
Das sind im wesentlichen die Punkte, die ich einzeln durchgegangen bin, um mich für ein Board zu entscheiden. Diesen Prozess werde ich hier auch direkt Aufzeigen:
8 Bit oder 32 Bit Prozessor?
Vorweg: Ich habe mich für einen 8-Bit Prozessor entschieden. Wieso? Verschiedene Gründe! Boards mit 8-Bit Prozessoren sind günstiger. Software für 8-Bit Prozessoren war zum Zeitpunkt des Umbaus ausgereifter (Marlin 2 noch in beta). Außerdem ist der CR-10s weder ein core-x-y noch ein delta Drucker, daher sind die Rechnungen die ständig ausgeführt werden, nicht sonderlich aufwändig. Da ich normalerweise gerne an der „bleeding edge“ unterwegs bin, fiel mir die Entscheidung erst nicht leicht. Dann dachte ich aber ich müsse mir ja für spätere Projekte noch was aufheben und habe dann die 8-Bit Variante mal durchgezogen.
12V oder 24V?
Diese Frage ist für die Auswahl der Boards meistens gar nicht so entscheidend, da die meisten sowohl mit 12V, als auch mit 24V betrieben werden können. 24V bringt leichte Vorzüge für die Stepper Motoren, da diese bei 24V in günstigere Arbeitspunkte kommen und etwas mehr Drehmoment bereitstellen können. Außerdem bleibt die Leistung im wesentlichen gleich, sodass weniger Strom bei höhere Spannung fließt.
Bei entsprechendem Aufbau kann auch das Heizbett und das Hotend schneller aufgeheizt werden. Der große Nachteil am Umbau auf 24V ist, dass alle Teile am CR-10s auf 12V ausgelegt. Das Netzteil liefert 12V, was in meinem Fall kein Problem gewesen wäre, da ich ohnehin ein neues einbauen wollte. Aber auch die Lüfter und das hotend sind für 12V ausgelegt. Es müssten also entweder alle Lüfter ausgetauscht werden, oder noch ein entsprechender Spannungsregler dazu kommen. Oder sogar beides, da einige Lüfter konstant laufen, der Teile-Lüfter aber PWM gesteuert ist. Insgesamt haben für mich dann die Nachteile überwogen, sodass ich bei einem 12v Aufbau geblieben bin.
Erweiterbar und Änderbar oder fertig und voll integriert?
Auf dem Markt gibt es eine Vielzahl verschiedener Boards, auch nachdem ich schon einige Entscheidungen getroffen haben. Es gibt Boards bei denen man fast alles einzeln austauschen kann und Boards die komplett fertig sind. Der Vorteil am komplett fertigen Board ist, dass es schon jemand zusammengestellt hat, dass man sich einige Steckverbindungen spart und vor allem können fertige integrierte Lösungen viel kleiner sein, da eben die ganzen Steckverbinder nicht notwendig sind. Ein Board bei dem ich die Treiber nicht austauschen kann kam bei mir nicht in Frage.
Zusammen mit den bisher getroffenen Eingrenzungen fiel bei mir die Wahl zwischen einem RAMPS 1.4 (oder 1.5 / 1.6), einem MKS Gen 1.4 und dem MKS Gen L 1.0. Das RAMPS würde ich mal als den Klassiker bezeichnen. Das Board bietet die Möglichkeit 5 Treiber aufzustecken und kommt ohne micro Controller daher. Zusätzlich wird also noch ein Arduino Mega benötigt. Die beiden Boards werden dann zusammengesteckt, es ist also fast alles einzeln austauschbar. Mir kam das entstehende Konstrukt dann etwas dick daher, außerdem schienen mir die anderen Varianten etwas „higher suffisticated“.
Die MKS Gen Reihe ist im Prinzip ein RAMPS mit einem Arudino Mega auf einem Board. Auch diese Boards bieten 5 Steckplätze für Treiber, sowie eine Reihe an weiteren herausgeführten GPIOs und Anschlüssen für die Versorgung. Die Unterschiede zwischen dem MKS Gen 1.4 und dem MKS Gen L 1.0 sind nicht besonders groß. Das MKS Gen L 1.0 ist neuer und hat einen anderen Formfaktor. Die kompaktere Größe hat mir besser gefallen, daher habe ich mich für genau dieses Board entschieden.